研究紹介
--- 進行中の主な研究テーマ ---
・小型2足ロボットによるスケート運動の実現
-安定した滑走を実現するスケートの"蹴り"動作の開発-
-シミュレーションによる新たな滑走手法の提案-
-3次元画像処理による機体の運動計測-
・安定した細胞灌流培養を実現する細胞遠心分離システムの開発
・小型人型ロボットによる壁間登りの実現
小型2足ロボットによるスケート運動の実現
現在の人型ロボットの主な移動手段である二足歩行は環境への適応性が高い一方,全身のアクチュエータを駆動させるためにエネルギー効率が悪く,移動速度も遅いという欠点があります.そこで本研究室では,"シンプルな揺動運動を利用したスケート運動の実現"により,二足ロボットの移動速度の向上・エネルギー効率の改善を目指しています.
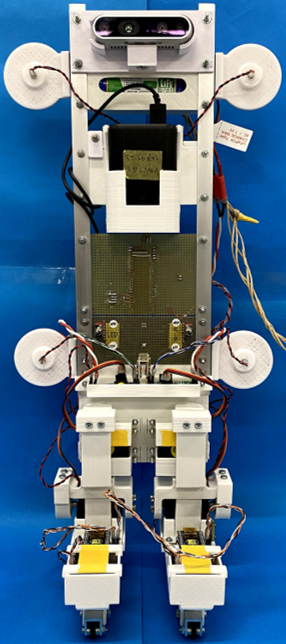
開発したスケートロボットは,脚部にYaw軸,Pitch軸を持つ合計4自由度の単純な構成となっており,ロボットを単一の剛体と捉えて,その揺動運動により機体を前進させています.このような単純な原理と構成は,現実の多様な二足ロボットへの適用という点で重要になります.
-安定した滑走を実現するスケートの"蹴り"動作の開発-
これまで開発してきたスケートロボットでは,滑走時の転倒や意図しない旋回など,滑走の安定性に課題がありました.この原因の一つとして,事前に算出した機体のRoll角軌道モデルを再現するという従来のオフラインな蹴り動作では,滑走時の機体の揺動を十分に制御できていないことが挙げられます.そこで,機体にDepth Camera (Intel RealSense D435) を搭載し,3次元画像処理から機体姿勢をオンラインに算出することで,滑走時の機体Roll角を用いて蹴り角度を決定する手法を新たに開発しました.これによって,従来よりもスムーズな揺動運動となり,滑らかな滑走とその距離の延長を実現しています.詳細はこちらをご覧ください.
このほかにも,9軸センサを用いた低計算コストな機体姿勢の取得によるアプローチや,機体の自由落下を逆トレースするような軌道(等エネルギー軌道)によってエネルギーの観点から滑走の安定化を図るアプローチなどを研究しています.
文献
[1] 貝原: 小型二足ロボットのスケート運動 -RealSenseを用いた機体揺動角度の取得および蹴り動作の改善-, 令和2年度横浜国立大学大学院修士論文, 2021
[2] 長松: 小型二足スケートロボット -9軸センサを用いた蹴り動作精度の向上-, 令和2年度横浜国立大学卒業論文, 2021
[3] 貝原, 内田, 杉内: スケート運動によって移動する小型二足ロボットの蹴り動作の改善, ロボティクス・メカトロニクス講演会2020講演概要集, 2020
-シミュレーションによる新たな滑走手法の提案-
本研究室では,実機開発に加えて,物理演算エンジン (Open Dynamics Engine) によるシミュレーションを活用して新たな滑走方法の検討や各種パラメータの最適化による滑走の洗練化に取り組んでいます.シミュレーションによって新しい滑走アイデアの実現性を検討し,新たな滑走手法や動作を開発することでスケートロボットの実用性向上を目指しています.例えば,実際のスケートにおいて用いられているテクニックを応用した,スケートロボットにおける滑走の減速・停止方法を新たに提案し,シミュレーションによって動作に成功・失敗するパラメータの探索とその考察を行っています.詳細はこちらをご覧ください.
このほかにも,斜面滑走の実現に向けた滑走手法の提案,パラメータ最適化などの研究に取り組んでいます.
文献
[1] 渋井: 小型二足ロボットのスケート運動 -パラメータ最適化による減速、停止の実現-, 令和2年度横浜国立大学大学院修士論文, 2021
[2] 紀伊馬: 小型二足ロボットによるスケート運動 -シミュレーションによる斜面滑走時の最適パラメータの検討-, 令和2年度横浜国立大学卒業論文, 2021
-3次元画像処理による機体の運動計測-
これまで,実機実験・シミュレーションを通して滑走の安定化・高効率化を試みてきましたが,これらの滑走状態の定量評価は十分に実現できておらず,機体の転倒原因の解明とその分析による有効な改善策の提案というフィードバックには至っていませんでした.そこで,Depth Cameraを用いた3次元画像処理によって,機体の滑走状態を定量的に評価できる計測システムを開発しました.これによって,機体の位置・姿勢,脚部の接地状態などを計測でき,現在のスケート運動では,揺動運動のRoll角が非対称であること,本来の滑走計画に反して脚部のつま先がかかとよりも先に着地しているなどの課題が抽出されています.今後は,滑走状態の考察と改良策の提案,実機とシミュレーションのギャップを埋めること等への計測システムの活用が期待されています.詳細はこちらをご覧ください.
このほかにも,オムニホイールを用いた追尾型計測ロボットの開発による計測範囲の拡大などの研究に取り組んでいます.
文献
[1] 佐藤: 小型二足ロボットのスケート運動 -三次元画像処理を用いた運動計測-, 令和2年度横浜国立大学大学院修士論文, 2021
[2] 佐々木: 小型二足ロボットのスケート運動 -追尾型計測ロボットを用いた機体の運動計測-, 令和元年度横浜国立大学卒業論文, 2020
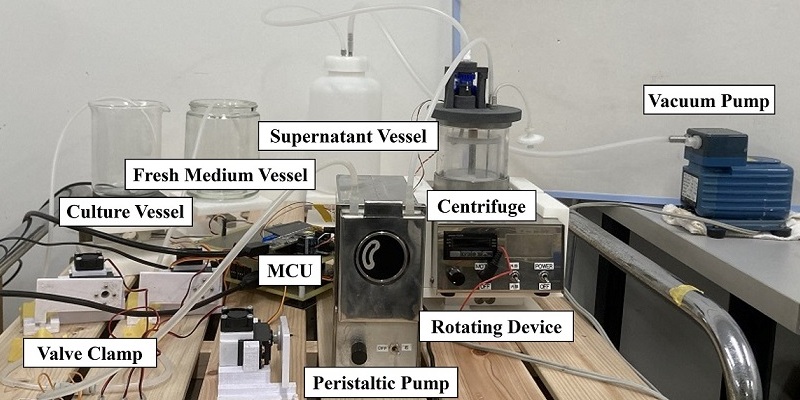
安定した細胞灌流培養を実現する細胞遠心分離システムの開発
近年,再生医療や抗体医薬品生産などをはじめとして動物細胞の安定かつ効率的な培養への需要が高まっています.動物細胞を安定的に培養するためには安定した培地環境の維持が必要となりますが,これには培養中に培地の交換を行う灌流培養が有効です.しかし,現在主流の灌流培養では,培地交換工程において,マイクロフィルターを用いて細胞と培地の分離を行っており,フィルターの目詰まりという潜在的なリスクから,長期的な安定培養の実現が困難であるという課題を抱えています.そこで,本研究室では,遠心分離を用いた培地交換というアプローチによってこの課題の解決を目指し,"実用的な小型遠心分離機を用いた灌流培養システムの開発"に取り組んでいます.具体的には,小型遠心分離機および灌流培養システムを試作するとともに,自動培地交換システムや分離機内液量の計測・制御といった要素技術を開発しました.また,動物細胞などを用いた性能評価実験を通して,開発システムの成立性を検証しました.現在は,灌流培養試験による開発システムの実用性実証を目指しています.詳細はこちらをご覧ください.
このほかにも,遠心分離技術を軸として,細胞洗浄やバッファー置換といった細胞培養に関わる様々な工程の自動化・効率化の実現を目指した研究に取り組んでいます.
文献
[1] 堤: 安定した細胞灌流培養の実現に向けたインライン細胞遠心分離システムの開発, 令和3年度横浜国立大学大学院修士論文, 2022
[2] 堤, 磯野, 杉内, 石川, 小林, 奥村, 福田: 安定した細胞灌流培養の実現に向けたインライン細胞遠心分離システムの自動化と運転パラメータ決定への基礎検討, 第21回計測自動制御学会システムインテグレーション部門講演会論文集, 2020
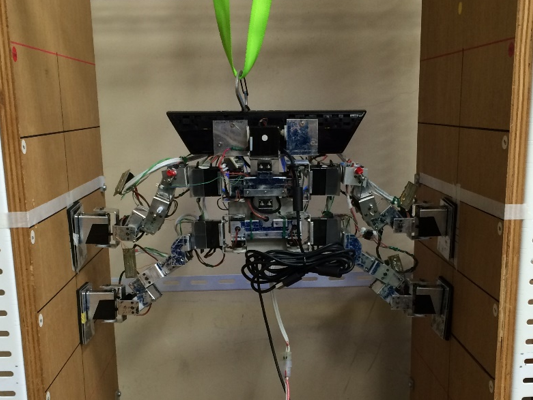
小型人型ロボットによる壁間登りの実現
今日に至るまで,小型人型ロボットに関する研究は数多く行われており,社会進出も果たしていますが,多様な障害物が存在する不整地における自由な行動の実現には未だ様々な課題が残されています.そこで,本研究室では,小型人型ロボットの不整地環境での走破性向上のための様々な基礎動作技術の開発を目的に,その一例として"小型人型ロボットによる壁間よじ登り動作の実現"に取り組んでいます.これまでに,本研究室で開発した壁登り用ロボットを用いて,垂直に立てた2枚の平行壁間の壁登り動作の実現や,把持理論を応用した壁登り動作の提案などをしてきました.現在は,新規の壁登り用ロボットの設計・製作に取り組んでおり,今後はこの新規機体を用いて壁登り動作の高度化を目指します.
文献
[1] 杉内, 小濱, 十文字: 小型人型壁登りロボットの安定性向上, ロボティクス・メカトロニクス講演会2018講演概要集, 2018